







































































































Agordu la parametron de la motoro de la plurkapa pesilo




Alĝustiga metodo de motora parametro.
La motorreĝimo havas kvar specojn de kodo: 1, 2, 3, 4
-Motorreĝimo 1 estas la movmaniero de 100 paŝoj por motoro
-Motorreĝimo 2 estas la movmaniero de 96 paŝoj por motoro
-Motorreĝimo 3 estas la movmaniero de 88 paŝoj de motoro
-Motorreĝimo 4 estas la movomaniero de 80 paŝoj de motoro
La sitela malfermo estas de granda al malgranda: motorreĝimo 1 - motorreĝimo 2
-motora reĝimo 3-motora reĝimo 4 kiel montrite en la alligita figuro.
Noto: la motorrapido ankaŭ povas esti agordita rapide aŭ malrapide (laŭ la faktaj bezonoj)

Se vi elektas la defaŭltan motoron 1, sed ne povas plenumi la postulojn, eĉ la buŝo de la ujo jam estas malfermita je la maksimumo, kio bezonas manan alĝustigon.
Ekzemple, kiam la materialo estas fiksita dum eligo, ĝi estas montrita en fig. 2-3 kiel la fiksa materialo de la engluujo. Do vi devas trovi la parametro-agordan paĝon, ŝanĝi la malferman tempon de la engluujo: 10ms aŭ 20ms... kiel montras Figuro 2-4.
Se ankoraŭ ne funkcias, vi bezonas ĝustigi la parametrojn de la motoro
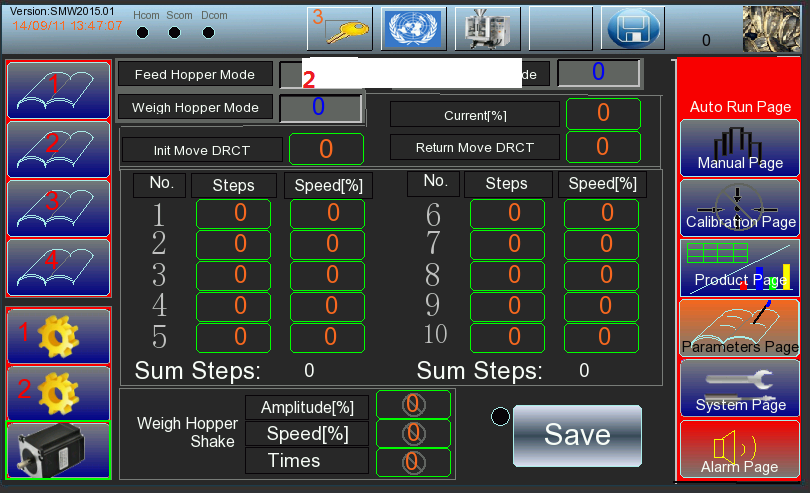

Prenu ekzemple la reĝimon 2 de la nutraĵujo 2-5: la unua paŝo estas elekti la reĝimon 2 de la nutraĵujo sur paĝo 3(2-7) de la paĝo de parametro-agordo. Alklaku trovu la motorreĝimon de la nutrilujo, enigu 2.
trovu la motorreĝimon de la nutrilujo, enigu 2.
Kiam ĝi ŝanĝiĝas al 2 , nun ni povas modifi ĝian parametron, kiel montras 2-6.
, nun ni povas modifi ĝian parametron, kiel montras 2-6.
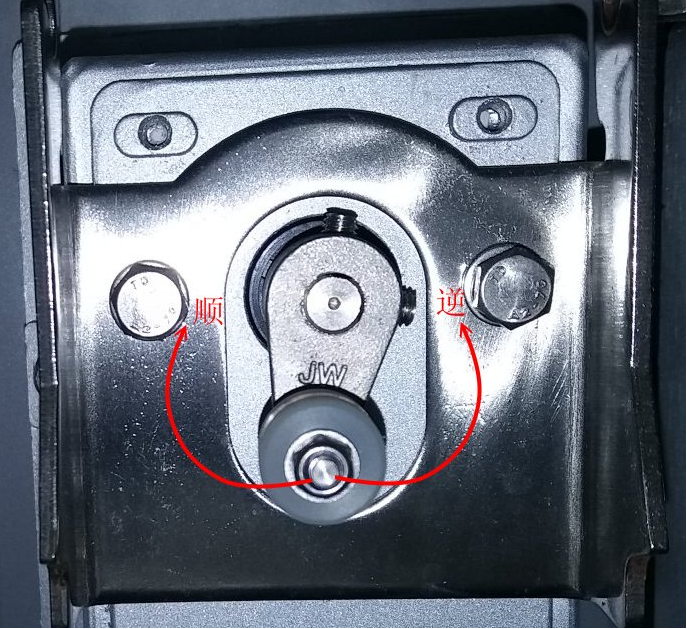
Laŭ 2-6. , vi povas vidi ke la pordomalferma direkto estas 1, pordoferma direkto estas o. 1 signifas ke la motoro rotacias maldekstrume, o signifas ke la motoro rotacias dekstrume, kiel 2-5 montras.
Tordmomantaj agordoj estas ĝenerale 4
La paŝoj estas dividitaj en la unuajn duonpaŝojn kaj la duajn duonpaŝojn:
La unua duonpaŝo rilatas al la nombro da paŝoj, kiujn la motoro rotacias dekstrume aŭ maldekstrume, kio estas la malfermo de la pordo de la ujo.
La dua duonpaŝo rilatas al
La dua duono de la paŝo rilatas al la nombro da paŝoj, kiujn la motoro rotacias kiam la pordo de la ujo estas fermata.
(Ju pli granda estas la nombro da paŝoj, des pli granda estas la malfermo de la pordo de la ujo, kaj se oni konservas la saman rapidon, des pli longa estos la rotacia tempo, do la rapido devas esti pli granda laŭe)
Fine, premu la butonon Konservi por konservi la parametrojn, poste venu al la mana testa paĝo, elektu unuopan enigaĵujon por kontroli ĉu la angulo de la pordomalfermo estas ĝusta aŭ ne. Samtempe, vi devus rimarki ĉu estas nenormala sono aŭ nenormala fenomeno.
Pezilujreĝimo kaj tempigilujreĝimo ankaŭ uzas la saman manieron.

Smart Weigh estas tutmonda gvidanto en altpreciza pesado kaj integraj paksistemoj, fidinda por pli ol 1000 klientoj kaj pli ol 2000 paklinioj tutmonde. Kun loka subteno en Indonezio, Eŭropo, Usono kaj UAE , ni liveras kompletajn pakliniojn, de nutrado ĝis paledigo.
Rapida Ligilo
Pakmaŝino