

























































































ဘက်စုံခေါင်းအလေးချိန်စက်၏ မော်တာ၏ ကန့်သတ်ချက်ကို ချိန်ညှိပါ




မော်တာ ကန့်သတ်ချက် ချိန်ညှိမှု နည်းလမ်း။
မော်တာမုဒ်တွင် ကုဒ်အမျိုးအစားလေးမျိုးရှိသည်- ၁၊ ၂၊ ၃၊ ၄
- မော်တာမုဒ် ၁ သည် မော်တာအတွက် ခြေလှမ်း ၁၀၀ ရွေ့လျားမှုနည်းလမ်းဖြစ်သည်။
- မော်တာမုဒ် ၂ သည် မော်တာအတွက် အဆင့် ၉၆ ဆင့်၏ ရွေ့လျားမှုနည်းလမ်းဖြစ်သည်။
- မော်တာမုဒ် ၃ သည် မော်တာ၏ အဆင့် ၈၈ ဆင့်၏ ရွေ့လျားမှုလမ်းကြောင်းဖြစ်သည်။
- မော်တာမုဒ် ၄ သည် မော်တာ၏ ၈၀ ဆင့် ရွေ့လျားမှုလမ်းကြောင်းဖြစ်သည်။
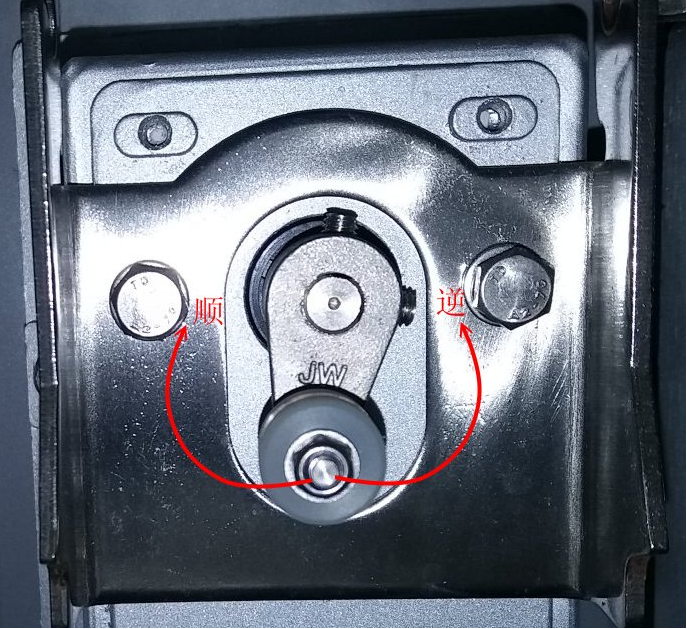
ပုံးအပေါက်သည် ကြီးမှ သေးသို့ဖြစ်သည်- မော်တာမုဒ် ၁ - မော်တာမုဒ် ၂
ပူးတွဲပါပုံတွင်ပြထားသည့်အတိုင်း -မော်တာမုဒ် ၃-မော်တာမုဒ် ၄။
မှတ်ချက်- မော်တာအမြန်နှုန်းကို လျင်မြန်စွာ သို့မဟုတ် ဖြည်းဖြည်းချင်း ချိန်ညှိနိုင်သည် (တကယ့်လိုအပ်ချက်များအရ)

ပုံသေမော်တာ ၁ ကို ရွေးချယ်ပေမယ့် လိုအပ်ချက်တွေနဲ့ မကိုက်ညီရင်၊ ဟော့ပါရဲ့ ပါးစပ်က အများဆုံးဖွင့်ထားပြီးသားမို့ ကိုယ်တိုင်ချိန်ညှိဖို့ လိုအပ်ပါတယ်။
ဥပမာအားဖြင့်၊ စွန့်ထုတ်သည့်အခါ ပစ္စည်းကို ညှပ်ထားသောအခါ၊ ၎င်းကို ပုံ ၂-၃ တွင် feed hopper clamp ပစ္စည်းအဖြစ် ပြသထားသည်။ ထို့ကြောင့် သင်သည် parameter setting စာမျက်နှာကိုရှာရန်၊ ပုံ ၂-၄ တွင်ပြထားသည့်အတိုင်း feed hopper open time ကိုပြောင်းလဲရန် လိုအပ်သည်- 10ms သို့မဟုတ် 20ms...
အလုပ်မလုပ်သေးရင် မော်တာရဲ့ parameters တွေကို ချိန်ညှိဖို့ လိုပါတယ်
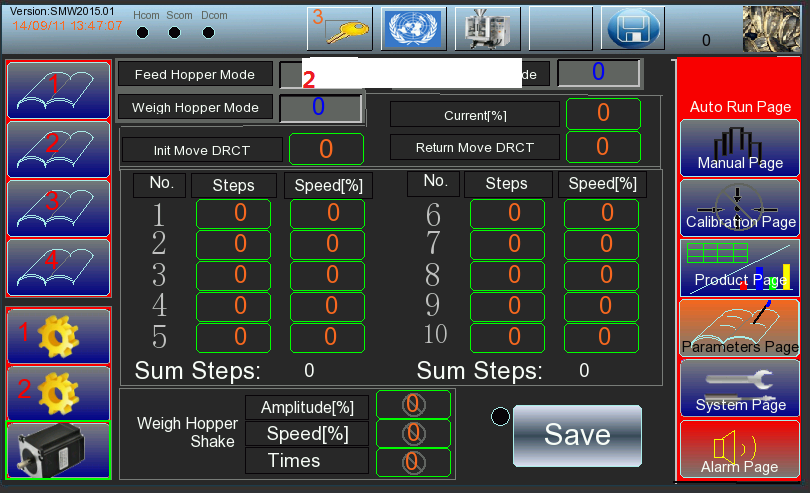

ဥပမာ 2-5 feed hopper mode 2 ကိုယူပါ- ပထမအဆင့်မှာ parameter setting စာမျက်နှာ၏ စာမျက်နှာ 3(2-7) ရှိ feed hopper mode 2 ကို ရွေးချယ်ရန်ဖြစ်သည်။ နှိပ်ပါ feeder hopper motor mode, input 2 ကိုရှာပါ။
feeder hopper motor mode, input 2 ကိုရှာပါ။
၂ အဖြစ် ပြောင်းလဲလိုက်တဲ့အခါ 2-6 မှာပြထားတဲ့အတိုင်း အခု သူ့ရဲ့ parameter ကို ပြင်နိုင်ပါပြီ။
2-6 မှာပြထားတဲ့အတိုင်း အခု သူ့ရဲ့ parameter ကို ပြင်နိုင်ပါပြီ။
၂-၆ အရ၊ တံခါးဖွင့်သည့် ဦးတည်ရာသည် 1 ဖြစ်ပြီး၊ တံခါးပိတ်သည့် ဦးတည်ရာသည် o ဖြစ်သည်။ 1 ဆိုသည်မှာ မော်တာသည် နာရီလက်တံပြောင်းပြန်လည်ပတ်သည်ဟု ဆိုလိုပြီး၊ o ဆိုသည်မှာ ၂-၅ တွင်ပြထားသည့်အတိုင်း မော်တာသည် နာရီလက်တံပြောင်းပြန်လည်ပတ်သည်ဟု ဆိုလိုသည်။
Torque ချိန်ညှိမှုများသည် ယေဘုယျအားဖြင့် ၄ ခုဖြစ်သည်
အဆင့်များကို ပထမတစ်ဝက်အဆင့်များနှင့် ဒုတိယတစ်ဝက်အဆင့်များအဖြစ် ခွဲခြားထားသည်-
ပထမတစ်ဝက်အဆင့်ဆိုသည်မှာ မော်တာသည် နာရီလက်တံလည်ပတ်မှု သို့မဟုတ် နာရီလက်တံဆန့်ကျင်ဘက်လည်ပတ်သည့် အဆင့်အရေအတွက်ကို ရည်ညွှန်းပြီး ၎င်းသည် ဟော့ပါ၏တံခါးဖွင့်ခြင်းဖြစ်သည်
ဒုတိယပိုင်းအဆင့်များသည် ရည်ညွှန်းသည်
အဆင့်၏ ဒုတိယတစ်ဝက်သည် ဟော့ပါတံခါးကို ပိတ်လိုက်သောအခါ မော်တာလည်ပတ်သည့် အဆင့်အရေအတွက်ကို ရည်ညွှန်းသည်။
(ခြေလှမ်းအရေအတွက် များလေ၊ ဟော့ပါ၏တံခါးဖွင့်သံ ကျယ်လေဖြစ်ပြီး အမြန်နှုန်းတူညီနေပါက လည်ပတ်ချိန်လည်း ပိုကြာမည်ဖြစ်သောကြောင့် အမြန်နှုန်းကို လိုက်လျောညီထွေဖြစ်အောင် ချိန်ညှိသင့်သည်)
နောက်ဆုံးအနေနဲ့၊ သတ်မှတ်ချက်တွေကို သိမ်းဆည်းဖို့ Save ခလုတ်ကို နှိပ်ပါ၊ ပြီးရင် manual test စာမျက်နှာကို သွားပြီး တံခါးဖွင့်တဲ့ထောင့် အဆင်ပြေမပြေ စစ်ဆေးဖို့ single feed hopper ကို ရွေးချယ်ပါ။ တစ်ချိန်တည်းမှာပဲ၊ ပုံမှန်မဟုတ်တဲ့ အသံ ဒါမှမဟုတ် ပုံမှန်မဟုတ်တဲ့ ဖြစ်စဉ် ရှိမရှိ သတိပြုသင့်ပါတယ်။
Weigh hopper မုဒ်နှင့် timing hopper မုဒ်တို့သည်လည်း အတူတူပင်ဖြစ်သည်။

Smart Weigh သည် မြင့်မားသောတိကျမှုရှိသောအလေးချိန်နှင့်ပေါင်းစပ်ထုပ်ပိုးမှုစနစ်များတွင် ကမ္ဘာလုံးဆိုင်ရာဦးဆောင်သူဖြစ်ပြီး ကမ္ဘာတစ်ဝှမ်းရှိ ဖောက်သည် ၁၀၀၀ ကျော် နှင့် ထုပ်ပိုးမှုလိုင်း ၂၀၀၀ ကျော်၏ ယုံကြည်စိတ်ချရမှုရှိသည်။ အင်ဒိုနီးရှား၊ ဥရောပ၊ အမေရိကန်နှင့် UAE တို့တွင်ဒေသခံပံ့ပိုးမှုဖြင့်ကျွန်ုပ်တို့သည်ကျွေးမွေးခြင်းမှသည် palletizing အထိ turnkey ထုပ်ပိုးမှုလိုင်းဖြေရှင်းချက်များကိုပေးဆောင်သည်။
အမြန်လင့်ခ်
ထုပ်ပိုးစက်