Simula noong 2012 - ang Smart Weigh ay nakatuon sa pagtulong sa mga kliyente na mapataas ang produktibidad sa mas mababang gastos. Makipag-ugnayan sa amin Ngayon!








































































































Ayusin ang parameter ng motor ng multihead weigher




Paraan ng pagsasaayos ng parameter ng motor.
Ang motor mode ay may apat na uri ng code: 1,2,3,4
-Ang Motor mode 1 ay ang paraan ng paggalaw ng 100 hakbang para sa motor
-Ang Motor mode 2 ay ang paraan ng paggalaw ng 96 na hakbang para sa motor
-Ang Motor mode 3 ay ang paraan ng paggalaw ng 88 hakbang ng motor
-Ang Motor mode 4 ay ang paraan ng paggalaw ng 80 hakbang ng motor
Ang butas ng balde ay mula malaki hanggang maliit: motor mode 1 - motor mode 2
-motor mode 3-motor mode 4 gaya ng ipinapakita sa nakalakip na pigura.
Paalala: ang bilis ng motor ay maaari ding isaayos nang mabilis o mabagal (ayon sa aktwal na pangangailangan)

Kung pipiliin ang default na motor 1, ngunit hindi matugunan ang mga kinakailangan kahit na ang bibig ng hopper ay nakabukas na sa pinakamataas na antas na nangangailangan ng manu-manong pagsasaayos.
Halimbawa, kapag ang materyal ay naka-clamp habang inilalabas, ipinapakita ito sa fig. 2-3 bilang ang materyal na pang-clamp ng feed hopper. Kaya kailangan mong hanapin ang pahina ng setting ng parameter, baguhin ang oras ng pagbubukas ng feed hopper: 10ms o 20ms...tulad ng ipinapakita sa Fig. 2-4.
Kung hindi pa rin gumagana, kailangan mong ayusin ang mga parameter ng motor
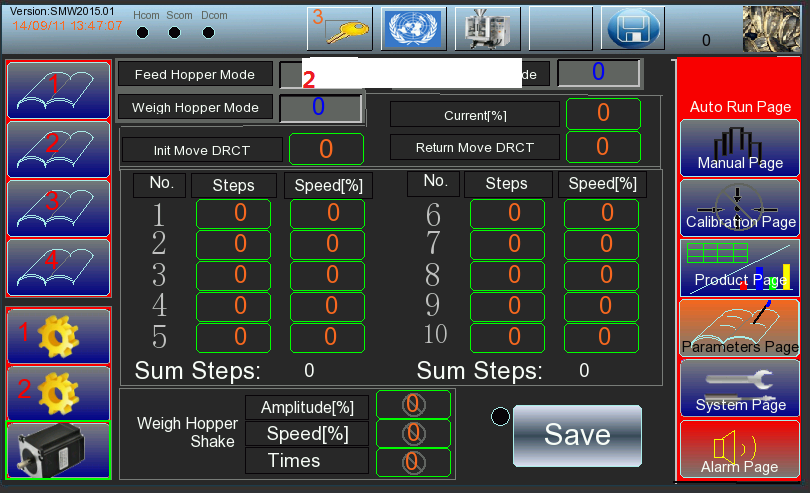

Kunin halimbawa ang 2-5 feed hopper mode 2: ang unang hakbang ay piliin ang feed hopper mode 2 sa pahina 3(2-7) ng pahina ng setting ng parameter. I-click ang Hanapin ang feeder hopper motor mode, i-input ang 2.
Hanapin ang feeder hopper motor mode, i-input ang 2.
Kapag binago ito bilang 2 , maaari na natin ngayong baguhin ang parameter nito, gaya ng ipinapakita sa 2-6.
, maaari na natin ngayong baguhin ang parameter nito, gaya ng ipinapakita sa 2-6.
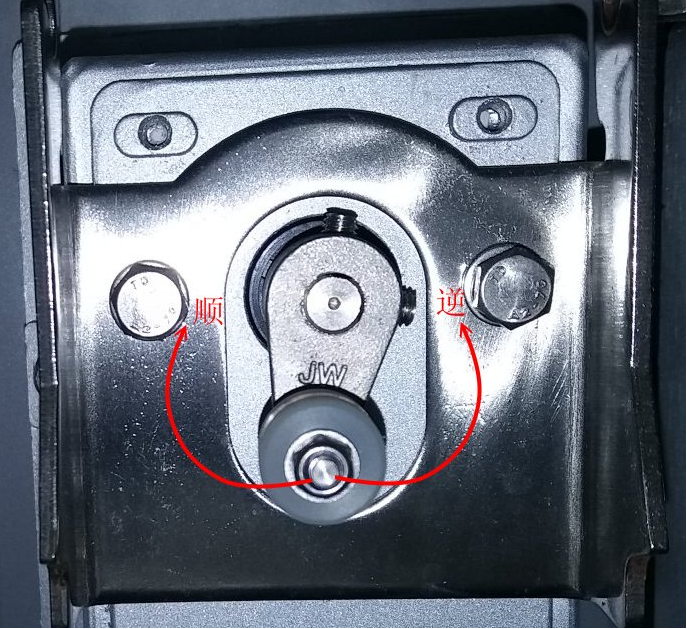
Ayon sa 2-6. , makikita mo na ang direksyon ng pagbukas ng pinto ay 1, at ang direksyon ng pagsasara ng pinto ay o. Ang ibig sabihin ng 1 ay umiikot ang motor nang pakaliwa, at ang ibig sabihin ng o ay umiikot ang motor nang pakanan, gaya ng ipinapakita sa 2-5.
Ang mga Setting ng Torque ay karaniwang 4
Ang mga hakbang ay nahahati sa unang kalahating hakbang at pangalawang kalahating hakbang:
Ang unang kalahating hakbang ay tumutukoy sa bilang ng mga hakbang na iniikot ng motor nang pakanan o pakaliwa, na siyang pagbubukas ng pinto ng hopper.
Ang ikalawang kalahating hakbang ay tumutukoy sa
Ang ikalawang kalahati ng hakbang ay tumutukoy sa bilang ng mga hakbang na iniikot ng motor kapag isinara ang pinto ng hopper.
(Kung mas malaki ang bilang ng mga baitang, mas malaki ang bukasan ng pinto ng hopper, at kung mananatili ang parehong bilis, mas matagal din ang oras ng pag-ikot, kaya dapat isaayos nang mas malaki ang bilis nang naaayon.)
Panghuli, pindutin ang buton na I-save upang i-save ang mga parameter, pagkatapos ay pumunta sa pahina ng manu-manong pagsubok, piliin ang single feed hopper upang suriin kung ang anggulo ng pagbukas ng pinto ay maayos o hindi. Kasabay nito, dapat pansinin kung mayroong abnormal na tunog, o abnormal na kababalaghan.
Pareho rin ang paraan ng paggamit ng weigh hopper mode at timing hopper mode.

Ang Smart Weigh ay isang pandaigdigang nangunguna sa high-precision weighing at integrated packaging systems, na pinagkakatiwalaan ng mahigit 1,000 customers at mahigit 2,000 packing lines sa buong mundo. Sa pamamagitan ng lokal na suporta sa Indonesia, Europe, USA at UAE , naghahatid kami ng mga turnkey packaging line solutions mula sa pagpapakain hanggang sa palletizing.
Mabilisang Link
Makinang Pang-empake